【研究成果】高木教授らによる研究がJournal of Biomechanicsに掲載
水泳におけるヒトの推進メカニズムを水泳ロボットを用いて世界で初めて多角的に解明
■研究成果ポイント
1. 北島康介選手をはじめ,世界で活躍するトップスイマーは効率よく水中で高い推進力を発揮しているはずだが,その推進メカニズムはこれまで明らかにされてこなかった.
2. そのヒトの推進メカニズムについて、ヒト型水泳ロボットを用い,流体力・圧力分布計測,流れの可視化を世界で初めて同時に実施し,多角的に解明した.
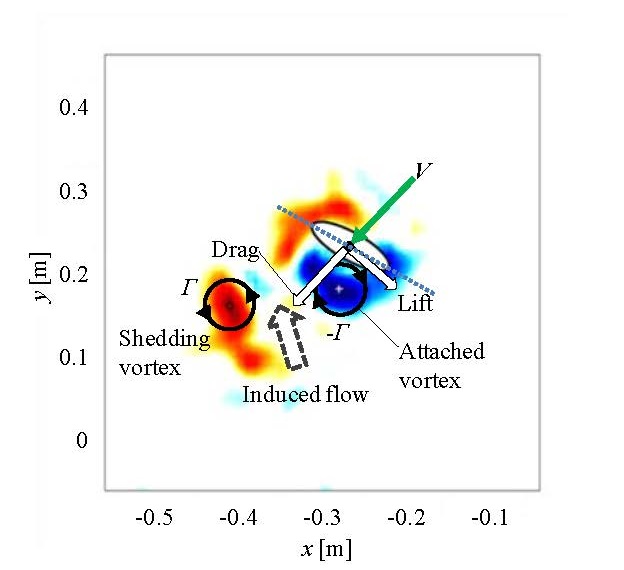
3.高い推進力発揮には,昆虫の飛翔などと同様に渦の発生が関与しており,非定常な力が作用することにより通常より大きな力が発生することが確認され,今後トップスイマーの泳技術改善への応用が期待される.
■掲載論文
題名:Unsteady hydrodynamic forces acting on a robotic hand and its flow field
日本語訳:ロボットの手部に発生する非定常流体力とその流れ場
著者:高木英樹(筑波大学、責任著者), 中島求,尾崎尚,松内一雄
ジャーナル名: journal of Biomechanics
発行日: 2013 年 6 月
■報道記事
マイナビニュース
http://news.mynavi.jp/news/2013/06/20/129/index.html
つくばサイエンスニュース
http://www.tsukuba-sci.com/?p=18560

2013-08-19
Copyright (c) Graduated School of Comprehensive Human Sciences, University of Tsukuba
